Ha valaha is megpróbáltál már robotkezet építeni, tudod, hogy az egy valóságos mérnöki rémálom. Az emberi kéz finom, alkalmazkodó fogásának reprodukálása a robotika egyik végső főellensége. Az elsődleges kihívás nem csupán az ízületek számának növelése; hanem egy olyan rendszer létrehozása, amely képes alkalmazkodni a szabálytalan alakú tárgyakhoz anélkül, hogy minden egyes ízülethez nehéz, energiafaló motorra lenne szükség. A legtöbb terv túl merev, túl bonyolult vagy túl törékeny a való világ számára.
Belép a képbe a Tesla. Egy nemrégiben közzétett szabadalmi bejelentés (WO2024/073138A1) az Optimus Gen 2 kézről fellebbenti a fátylat tervezési filozófiájukról, és ez a brutális hatékonyság nagymesteri bemutatója. Ahelyett, hogy a bonyolultságot hajszolták volna, a Tesla mérnökei az okos fizikára, a robusztus mechanikára és egy olyan tervezési etikára támaszkodtak, amely ordítja: “gyártásra készült, nem csak demókra!”
Az alulvezérelt előny
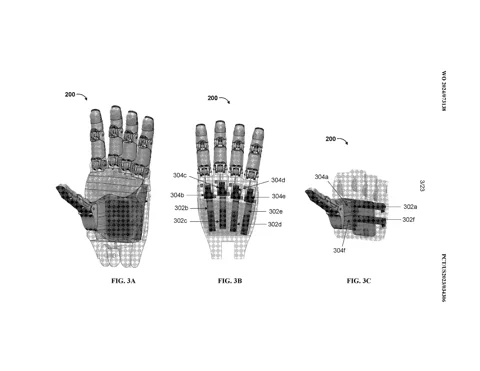
A Tesla tervezésének szíve egy “alulvezérelt” rendszer, egy olyan koncepció, ahol kevesebb motort használnak, mint az ízületek teljes száma. Az Optimus kéz esetében hat aktuátor tizenegy ízületet mozgat – kettőt a hüvelykujjhoz és egyet a négy ujj mindegyikéhez. Ezt egy kábelhajtású rendszerrel érik el, amely biológiai ínként működik. Egyetlen kábel fut végig minden ujjon, és amikor meghúzzák, az ízületek természetes, szekvenciális mozgással begörbülnek.
Ez a megközelítés megoldja az alkalmazkodóképesség problémáját. Mivel az ízületek nincsenek merev, előre meghatározott pályára kényszerítve, az ujjak passzívan alkalmazkodhatnak egy tárgy alakjához, legyen szó akár egy fúróról, akár egy törékeny tojásról. Ez a “mechanikai intelligencia” egy formája, amely a komplex fogási számításokat a szoftverről magára a hardverre hárítja.
De a Tesla mérnökei egy kulcsfontosságú csavart is bevetettek. Az ujjak tövénél lévő torziós rugók szándékosan merevebbek, mint az ujjhegyen lévők. Ez egy “passzív intelligenciát” hoz létre, ahol a gyengébb ujjhegyízület hajlik be először, hogy körbefogja a tárgyat, majd ezt követi az erősebb alapízület. Ez automatikusan garantálja a biztonságos, “bekerítő” fogást, anélkül, hogy a robot központi processzorának túl kellene gondolnia.
Csigahajtás: ingyenes nehéz terhek tartása
Talán a szabadalomban rejlő legzseniálisabb mérnöki húzás a csigakerék és csigahajtómű áttétel alkalmazása az aktuátorokhoz. Ez nem csupán a motor forgásának kábelhúzássá alakításáról szól; ez egy fizikai trükk, amely hatalmas hatással van a hatékonyságra.
A csigahajtások jellemzően “nem visszafordíthatók”. A nagy súrlódás és a fogak meredek szöge miatt a kimeneti kerék nem tudja megforgatni a bemeneti csigát. Egy robot számára ez egy szuperképesség. Amint az Optimus megragad egy nehéz tárgyat, a fogaskerekek mechanikusan rögzítik a fogást. A motorok ezután teljesen ellazulhatnak, nulla elektromos energiafogyasztással tartva a súlyt. Összehasonlítva a közvetlen meghajtású kezekkel, amelyeknek folyamatosan energiát kell égetniük a gravitáció ellen, ez monumentális győzelem az akkumulátor élettartama és a hőkezelés szempontjából.
Ez a beállítás hatalmas áttétel-csökkentést is biztosít egyetlen, kompakt fokozatban, lehetővé téve apró, nagy sebességű motorok számára, hogy csontzúzó szorítóerőt generáljanak, miközben elegánsan elhelyezkednek a tenyérben.
A való világra tervezve: tartósság és precizitás
A papíron nagyszerű terv mit sem ér, ha ezer ciklus után beadja a kulcsot. A szabadalom a hosszú távú megbízhatóság iránti mély megszállottságot mutatja.
A kábelhajtású rendszerek egyik legnagyobb hibapontja a kábel fáradása és nyúlása. A Tesla ezt két okos megoldással orvosolja:
- A konvex ív zsenialitás: Ahelyett, hogy a kábel élesen meghajlana egy ízületen, sima, konvex ívelt felületet alakítottak ki az ujjpercek között. Ez arra kényszeríti a kábelt, hogy biztonságos sugáron hajoljon, drámaian megnövelve élettartamát.
- Az automatikus feszítő: Az ujjbegyben egy rugós mechanizmus rejtőzik, amely folyamatosan húzza a kábel végét. Ez automatikusan felveszi az esetleges lazaságot, ahogy a kábel idővel nyúlik, biztosítva, hogy a kéz évekig feszes és reszponzív maradjon kézi karbantartás nélkül.
Az érzékeléshez a Tesla kikerülte a terjedelmes és hibára hajlamos mechanikus érzékelőket. Ehelyett egy állandó gyűrűmágnes van integrálva minden ízület forgáspontja köré. Egy álló Hall-effektus érzékelő méri a változó mágneses teret, ahogy az ízület forog, pontos, súrlódásmentes és kopásmentes szögérzékelést biztosítva. Ez az érintésmentes megközelítés kulcsfontosságú a milliméter alatti pontosság fenntartásához több millió ciklus alatt.
Több mint egy kéz, ez egy filozófia
A szabadalom sűrű, technikai nyelvezetét böngészve egy tiszta kép bontakozik ki. A Tesla nem laboratóriumi érdekességet épít; olyan terméket tervez, amelyet tömeggyártásra és a rendetlen, kiszámíthatatlan valós világban való bevetésre szánnak. Minden döntés – a nem visszafordítható fogaskerekektől az automatikusan feszülő inakig – a hatékonyságra, tartósságra és gyárthatóságra van optimalizálva.
Míg más humanoid robotok több szabadságfokkal vagy egzotikusabb aktuátorokkal dicsekedhetnek, az Optimus kéz egy pragmatikus megközelítést képvisel, amely a robotikus manipuláció alapvető problémáinak a lehető legegyszerűbb, legrobusztusabb módon történő megoldására összpontosít. Ez egy olyan terv, amely megérti, hogy a valós világban a megbízhatóság és a hatékonyság mindig állva hagyja a hivalkodó bonyolultságot. És ez, több mint bármely más funkció, az, ami ezt a tervet olyan lenyűgözővé teszi.
