Képzeld el, hogy 2035-öt írunk. Egy hatalmas üzemcsarnok közepén állsz, ahol 300 humanoid robot teszi a dolgát síri csendben és tűpontos hatékonysággal. Egyetlen bökkenő van: a zsebedben és az asztalodon is 300 különböző távirányító hever, a tervedet pedig, hogy egy óriási robotpáncéllá építsd össze őket, a HR már az első körben elkaszálta. Egy ekkora gépi munkaerő menedzselése ma még nem a sci-fi filmek csillogó jövője, hanem egy kőkemény és cseppet sem elegáns logisztikai rémálom. De mi lenne, ha elég lenne csak… rágondolnod, és a robotok azonnal engedelmeskednének?
Ez nem egy újabb cyberpunk thriller felütése, hanem egy valós probléma, amire a Kinexus nevű nyílt forráskódú projekt keresi a választ. Miközben a világ az olyan invazív, agyba fúrt chipek felé kacsintgat, mint a Neuralink, a Kinexus egy jóval barátságosabb utat választott: egy külsőleg hordható EEG-headset segítségével fordítja le a felhasználó gondolatait és hangutasításait a humanoid robotflotta nyelvére. Itt nem koponyaműtétekről van szó, hanem egy praktikus, skálázható hídról az emberi elme és a robotizált munkaerő között.
A robotirányítás skálázhatósági válsága
Ahogy a gyárak és raktárak egyre nagyobb számban állítanak munkába humanoid robotokat, egy ijesztő operációs fallal találják szemben magukat. Az „egy operátor – egy robot” modell egyszerűen nem fenntartható. A jelenlegi vezérlési módszerek vagy túlbonyolított szoftveres interfészekre, vagy ormótlan, közvetlen programozást igénylő kezelőpanelekre támaszkodnak. Ez egy olyan szűk keresztmetszetet hoz létre, ami pont azt a hatékonyságot öli meg, amiért a robotokat egyáltalán megvették. Néhány robotot még elirányítgat az ember, de több százat koordinálni már felér egy idegösszeomlással.
Itt válik kritikussá egy központosított, intuitív parancsnoki központ megléte. Az iparágnak szüksége van egy „vezérlősíkra” a fizikai eszközeihez – egy olyan megoldásra, amivel egyetlen felügyelő zökkenőmentesen vezényelhet le egy egész flottát. A Kinexus szerint a legtermészetesebb felhasználói felület az, amivel mindannyian születtünk: az agyunk.
Kinexus: Az agyad az új műszerfal
A Kinexus lényegében egy olyan vezérlőpult, amely valós idejű tolmácsként funkcionál közted és a robotsereged között. A Mourad Ouazmour mesterségesintelligencia-fejlesztő által megalkotott, elsősorban Pythonban írt rendszer a gyárautomatizáció központi idegrendszereként operál. Megjeleníti a kereskedelmi forgalomban kapható EEG-headsetből érkező agyhullámokat, diszkrét parancsokká alakítja őket, és közben térképen követi a teljes gyári környezetet.
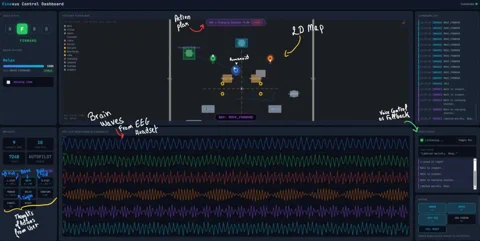
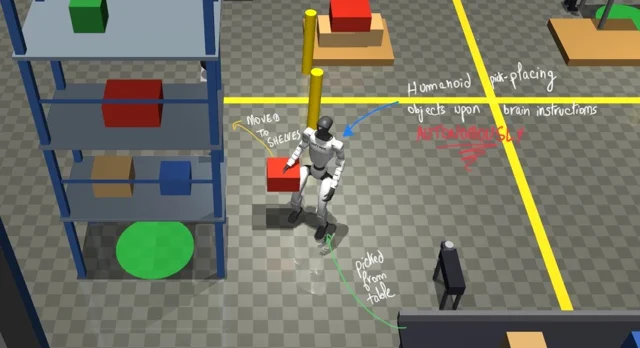
Az irányítás meglepően kézenfekvő. A fejlesztő leírása alapján a felhasználó például a jobb ökle összeszorításával adhat parancsot a robotnak a jobbra fordulásra, mindkét ököl szorításával az előrehaladásra, vagy akár egy nyelvmozdulattal válthat az üzemmódok között. A műszerfalon mindez élőben követhető:
- Élő EEG-hullámforma: Az agy elektromos aktivitásának valós idejű adatfolyama, különböző csatornákra bontva.
- Metódus-panel (Methods Panel): Ez a fordítómotor, ahol a konkrét mentális jeleket (mint az ökölbe szorított kéz képzete) hozzárendelik a robotműveletekhez (pl. „MOVE_LEFT” vagy „MOVE_FORWARD”).
- Üzemcsarnok térképe: Egy 2D-s vázlat, amely mutatja az összes humanoid tartózkodási helyét, állapotát és aktuális feladattervét.
- Hangalapú biztonsági tartalék: Az összetettebb, autonóm feladatoknál a rendszer elengedi a „telepátiát”. A felhasználó egyszerűen annyit mond: „vedd le a dobozt a szalagról, és tedd a 2-es palettára”, a kijelölt robot pedig önállóan navigál és végrehajtja a teljes sorozatot.
Sci-fi ambíciók vs. nyílt forráskódú valóság
Bár a robotok nem-invazív EEG-vel történő irányítása nem teljesen új keletű dolog, a flottakezelésben való alkalmazása az, ami a Kinexust igazán izgalmassá teszi. Az eddigi kutatások leginkább a mozgássérült emberek segítésére vagy egyetlen robot vezérlésére fókuszáltak, ahol az egyszerűbb feladatok pontossága módszertől függően 70% és 90% között mozgott. A Kinexus célja, hogy ezt a technológiát kiemelje a laboratóriumi steril környezetből, és bevigye a gyárak zajába.
A projekt legnagyobb dobása mégis az, hogy a GitHubon bárki számára elérhető és nyílt forráskódú. Ezzel demokratizálja a hozzáférést ehhez a futurisztikus irányítási paradigmához. Nem egy robotikai óriás méregdrága, zárt rendszere (walled garden), hanem egy eszközkészlet, amivel bárki kísérletezhet, továbbépítheti, vagy integrálhatja olyan hardverekkel, mint a nyílt forráskódú OpenBCI platform. Ez egy egész fejlesztői közösséget hív meg az EEG-vezérlés olyan rákfenéinek megoldására, mint a jelzaj vagy a felhasználóspecifikus kalibráció szükségessége.
Persze a GitHub-repozitóriumtól a gondolatvezérelt, zsongó gyárakig még hosszú az út. A nem-invazív EEG felbontása jóval alacsonyabb, mint az agyba épített chipeké, az ipari alkalmazáshoz szükséges 99% feletti megbízhatóság elérése pedig emberes feladat. De a Kinexus nem is egy kész terméket árul, hanem egy bátor és provokatív elképzelést villant fel. Egy olyan jövőt vetít előre, ahol az automatizált környezetek emberi felügyelete már nem a kétségbeesett gombnyomkodásról, hanem a fókuszált, stratégiai szándékról szól. Egyelőre ez egy lenyűgöző bepillantás abba a világba, ahol több száz robot irányítása nem lesz nehezebb egy kósza gondolatnál.