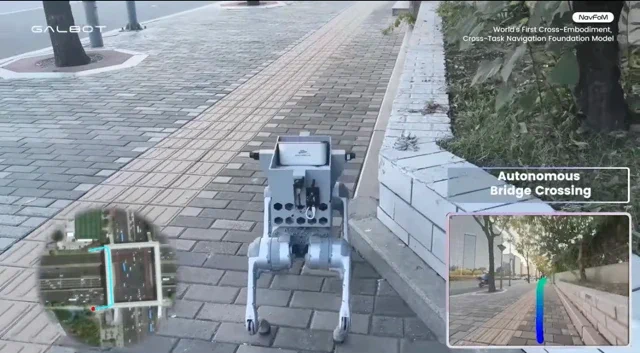
A Shanghai Jiao Tong University és a SenseTime Research kutatói nemrég egy olyan videóval rukkoltak elő, ami alaposan felkavarhatja a robotika állóvizét. Bemutatták a NavFm-et, amit a világ első „cross-embodiment, cross-task” navigációs alapmodelljeként (foundation model) emlegetnek. Konyhanyelven: építettek egy univerzális navigációs agyat, amit elvileg bármilyen robotba „beleültethetünk”, hogy az magabiztosan jusson el A-ból B-be anélkül, hogy bárminek is nekimenne. A demóban egy robotkutya mutatja be, hogyan kell profi módon venni a városi akadálypályát.

A négylábú gép elegánsan kerülgeti a gyalogosokat, kitartóan követi a célpontként kijelölt embert még vizuális zavaró tényezők mellett is, sőt, egy többlépcsős csomagküldési feladatot is csont nélkül abszolvál. Miután megkapja a küldetést, teljesen önállóan tervezi meg az útvonalát hidakon, járdákon és lépcsőkön át, hogy elérje a célját. Lenyűgöző látni ezt a szintű környezeti tudatosságot és feladatorientált útvonalkeresést, ami fényévekre van az egyszerű távirányítástól vagy az előre beprogramozott útvonalaktól. Persze az egy dolog, hogy egy steril demóvideóban simán siklik a járda, a valódi városi káosz kezelése már más tészta – ezt a leckét néhány önvezető futárrobot már a saját kárán is megtanulta. Kína robot-furgonjai nem félnek a betontól és a motoroktól
Miért is akkora durranás ez?
A kulcsszavak a „foundation model” és a „cross-embodiment”. Ahelyett, hogy minden egyes új robotnál vért izzadva kellene leprogramozni a navigációs logikát, egy alapmodell egyfajta általános intelligenciát biztosít, ami rugalmasan adaptálható. Gondoljunk rá úgy, mint a különbségre aközött, hogy minden autómodellhez egyedi motort kellene fejleszteni, vagy feltalálunk egy univerzális GPS-t, ami bármilyen járműben működik. Ha a NavFm ígéretei beigazolódnak, ugyanaz a magmodell, ami ezt a kutyát vezeti, minimális finomhangolással irányíthatna egy kerekes drónt vagy akár egy humanoid robotot is. Ez drasztikusan lerövidítheti a fejlesztési időt, és kritikus lépés lehet az olyan valóban általános célú robotok felé, amelyek képesek menet közben alkalmazkodni az új formákhoz és környezetekhez.