Egy harmadik robot csatasorba állítása elméletben rutinfeladat kellene, hogy legyen, a gyakorlatban viszont a robotikai fejlesztőcsapatok mintegy 90 százalékánál ez a pont, ahol összeomlik a rendszer. A többrobotos koordináció eddigi rákfenéje a központi vezérlés és a hatalmas sávszélesség-igény volt, ami miatt a gépek képtelenek voltak hatékonyan együttműködni. Az Oregon State University kutatói azonban most publikáltak egy olyan tervrajzot, amelyben a robotrajok egy hangyaboly néma, ösztönös intelligenciájával hangolják össze mozdulataikat.
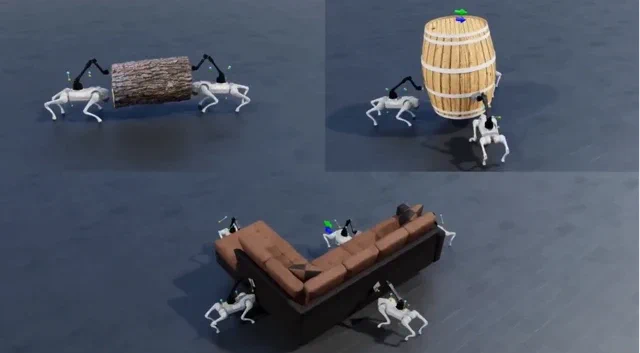
Az új tanulmány, a decPLM (Decentralized Pinch-Lift-Move), zöld utat kapott az IEEE International Conference on Robotics and Automation (ICRA) 2026-os konferenciájára – ami a robotika világában felér egy nagyszínpados fellépéssel a Coachellán. A rendszer lehetővé teszi, hogy négylábú, karral felszerelt robotok csapata közösen emeljen fel és mozgasson nehéz, nehezen megragadható tárgyakat – farönköket, hordókat, vagy akár egy kanapét –, mindezt egyetlen bitnyi kommunikáció nélkül. Nincs központi agy, nincs Wi-Fi, nincs kétségbeesett adatcsere az ízületi parancsokról. Ehelyett a koordináció tisztán abból fakad, hogy a robotok egyszerűen érzik a teherre kifejtett erőket a saját belső szenzoraik segítségével – ezt a biológiai ihletésű koncepciót hívják propriocepciónak.
A varázslat mögött egy közös irányelv (policy) áll, amelyet egy trükkös, úgynevezett „Constellation Reward” rendszerrel tanítottak be. Ez arra ösztönzi a robotokat, hogy úgy viselkedjenek, mintha mereven hozzá lennének rögzítve a rakományhoz. Ez a decentralizált megközelítés döbbenetesen hatékony és skálázható: bár a modellt szimulációban mindössze két robottal tanították, mindenféle utólagos finomhangolás nélkül működik akár tízfős csapatokkal is. Ezzel elegánsan kikerülik a hálózati rémálmokat, amelyek a többágensű rendszereket sújtják, ahol minden egyes új belépő csak növelné a késleltetést és a káoszt.
Miért akkora szám ez?
Ez a kutatás feje tetejére állítja azt a régi dogmát, miszerint a több robot automatikusan több problémát jelent. A decPLM esetében a több robot valójában kevesebb hibát szül. A kutatócsoport rájött, hogy ahogy kettőről tízre növelték a flotta létszámát, a rakomány mozgatási pontatlansága elképesztő, 80 százalékkal csökkent. A nagyobb csapat redundanciája természetes módon átlagolja ki az egyéni botlásokat, ami sokkal simább és precízebb manőverezést eredményez.
A kommunikációs mankó eldobásával az Oregon State egy olyan rendszert alkotott, amely alapjaiban robusztusabb és rugalmasabb bármelyik elődjénél. Egy olyan jövő felé mutat, ahol egy logisztikai robotraj bevetése nem bonyolultabb, mint egy újabb tagot adni a csapathoz, anélkül, hogy az egész hálózati architektúrát újra kellene tervezni. Ahogy a tanulmány nyersen és lényegre törően fogalmaz: ez a munka a végső bizonyíték arra, hogy „a robotika szűk keresztmetszete már nem a hardveres képességekben, hanem az ML-infrastruktúrában rejlik.”