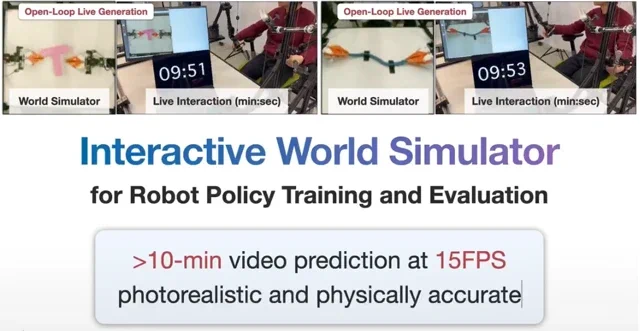
A robotikai világmodellek fizikai konzisztenciája eddig nagyjából egy ázott papírzacskóéval vetekedett a hosszabb szimulációk során. Az Interactive World Simulator projekt azonban most borítja az asztalt: több mint 10 perces, stabil és interaktív videó-predikciót generál 15 FPS mellett, mindezt egyetlen NVIDIA, Inc. RTX 4090-esen futtatva. Igen, jól olvastad. Tíz percnyi komplex fizikai szimuláció egy mezei fogyasztói videókártyán.
A Yixuan Wang kutató által fejlesztett, akció-kondicionált világmodell nem csupán egy előre lerenderelt videó; ez egy teljes mértékben interaktív szimuláció, amit valós időben „vezethetsz”. A legvonzóbb az egészben? Te magad is kipróbálhatod egy böngésző alapú demóban, Python-könyvtárakkal való bűvészkedés és a pip install okozta gyötrelem nélkül. A modell a legkülönfélébb, érintésintenzív (contact-rich) feladatokat is magabiztosan kezeli, a trükkös kábelvezetéstől kezdve a tárgyhalmok söpörgetéséig – mindezt tisztán pixel-alapon generálva. Ezek nem valódi kameraképek, hanem a modell saját, nyílt hurkú (open-loop) jóslatai a világról.
Miért korszakalkotó ez?
Ez nem csak egy látványos tech-demó, hanem potenciális gyógyír a robotika két legnagyobb fejfájására. Elsőként ott a skálázható adatgenerálás: ahelyett, hogy lassú és méregdrága fizikai robotokra várnánk az adatgyűjtéshez, a fejlesztők hegyeknyi fizikailag hiteles tréningadatot gyárthatnak a szimulátoron belül. Másodszor pedig lehetővé teszi a megbízható ágens-kiértékelést (policy evaluation), így a kutatók egy biztonságos, konzisztens és végtelenül ismételhető virtuális térben csiszolhatják a robot „agyát”, mielőtt egyáltalán hozzáérnének a hardverhez. Röviden: a robotok tanítása olcsóbb, gyorsabb és jóval veszélytelenebb lesz – így kisebb az esélye, hogy egy többmilliós robotkar véletlenül lyukat üssön a labor falába.












