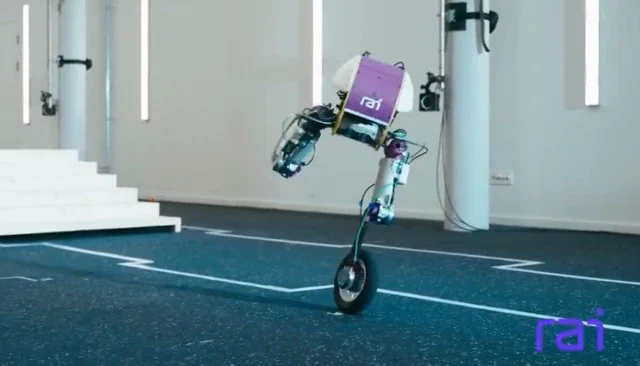
Ha azt hitted, hogy a kétlábú robotok végre magabiztosan megtanultak járni, a Robotics & AI Institute (RAI Institute) most bebizonyítja, hogy néha egyszerűen kifizetődőbb gurulni. A Boston Dynamics alapítója, a robotika-pápa Marc Raibert által vezetett kutatóműhely lerántotta a leplet legújabb prototípusáról: a Roadrunner egy pehelysúlyú, mindössze 15 kilós kétlábú gép, amely lábfejek helyett egy pár keréken egyensúlyoz. Ez a masina a helyváltoztatás egészen újszerű hibridjét mutatja be: képes párhuzamos kerekeken száguldani, trükkös „egysoros” görkorcsolya-üzemmódba váltani, sőt, ha a terep úgy kívánja, apró lépésekkel küzdi le az akadályokat.
A robot szimmetrikus lábai a térdízületnél előre és hátra is képesek hajolni, ami egészen különleges mozgásszabadságot ad neki. De az igazi bravúr nem a hardverben, hanem a „szürkeállományban” rejlik. A RAI Institute közlése szerint egyetlen egységes vezérlési modellt (control policy) tanítottak be a Roadrunner összes komplex mozdulatához. Ez tette lehetővé azokat a látványos mutatványokat – mint a földről való felpattanás vagy a bizonytalannak tűnő egyensúlyozás egyetlen keréken –, amelyeket „zero-shot” módon hajtott végre. Ez a szakzsargonban azt jelenti, hogy a gép mindenféle előzetes, fizikai finomhangolás nélkül, már az első éles bevetésen tökéletesen hozta a formáját.

A szimulációból a valóságba való azonnali átültetés (zero-shot transfer) hatalmas mérföldkő. Drasztikusan csökkenti a robotok betanításához szükséges időt és költségeket, hiszen korábban rengeteg aprólékos munkába telt áthidalni a virtuális és a fizikai világ közötti szakadékot. Azzal, hogy a szimulációban egy rendkívül stabil modellt alkottak, a RAI Institute képessé tette a Roadrunnert arra, hogy azonnal megértse saját dinamikáját, és a tanultakat késlekedés nélkül alkalmazza a való világban.
Miért akkora szám ez?
A lábas-kerekes hibridek ötlete nem teljesen új – a Boston Dynamics saját Handle robotja már évekkel ezelőtt megmutatta, mire képes ez a koncepció. A Roadrunner azonban a pehelysúlyú dizájnjával és a fejlett, egységesített AI-vezérlésével egy sokkal praktikusabb és költséghatékonyabb jövő felé mutat. Azzal, hogy a kerekek energiahatékonyságát ötvözi a lábak akadályleküzdő képességével, ez a gép telibe találja azt a piaci rést, amire a logisztikai és raktározási szektornak szüksége van.
Míg a teljesen humanoid robotok még mindig a járás, a futás és a szaltózás művészetét csiszolgatják, a Roadrunner egy másik evolúciós ösvényt választott: itt az agilitás és a hatékonyság fontosabb, mint az emberi forma szolgai másolása. Az, hogy egyetlen mesterséges intelligencia-modell képes uralni többféle mozgásformát, nem csak egy jól mutató technológiai bemutató; ez az az alapvető áttörés, ami a sokoldalú robotok fejlesztését és valós bevetését végre egyszerűbbé és elérhetőbbé teszi.