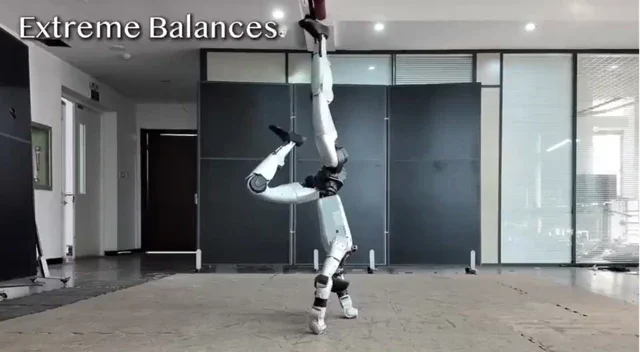
Felejtsük el a patikamérlegen kiszámolt, merev és előre programozott mozdulatokat. Az OmniXtreme névre keresztelt általános AI-irányítási rendszer szintet lépett: a humanoid robotok mostantól nemcsak a pengeélen egyensúlyoznak, de egymás után nyomják a szaltókat, sőt, még a breaktáncba is beleállnak. A Unitree Robotics G1-es modelljén prezentált képességek messze túlmutatnak a 2026-os tavaszi fesztiválgálán látott WuBOT látványos, de „túltanított”, egyfunkciós mutatványain – itt már valódi, sokoldalú robotatlétikáról beszélünk.
A Unitree-vel közös, egyéves projektnek megvolt az ára: a kutatócsapat bevallása szerint „tucatnyi G1-es robotot” hajtottak a halálba, mire sikerült feltörniük a dinamikus mozgás kódját. Ha belegondolunk, hogy egy G1-es alapára nagyjából 13 500 dollár (közel 5 millió forint), ez elég komoly hardveráldozat a megerősítéses tanulás (reinforcement learning) isteneinek oltárán. A cél az volt, hogy végre áttörjék a falat a specifikus mozdulatokat másoló algoritmusok és a való világ kaotikus fizikáját uralni képes rendszerek között.
A technológiai „titkos szósz” egy kétlépcsős tanítási folyamatban rejlik. Első körben egy áramlásalapú (flow-based) generatív kontrollmodellt kaptak a robotok, ami megadta az alapvető mozgáskultúrát. Ezt követte a „feketeleves”: az úgynevezett „actuation-aware residual RL” fázis, amely során a modellt a hús-vér (vagyis vas és szilikon) robot fizikai korlátaihoz és dinamikai sajátosságaihoz hangolták. A kutatók szerint ez a második szakasz volt a kulcs ahhoz, hogy a szimulációban tökéletesített mozdulatok a valóságban se végződjenek pofára eséssel. A közösség legnagyobb örömére a projekt gyümölcsét nem tartották meg maguknak: a modell checkpointjai már elérhetőek a GitHubon.
Miért akkora szám ez?
Egyetlen, egységes irányítási rendszerrel ennyiféle nagy erejű mozgást levezényelni igazi technológiai mérföldkő. Ez egyértelműen jelzi a paradigmaváltást: a csak egyetlen trükkre képes „szakbarbár” robotok helyett érkeznek a sokoldalú, minden helyzethez alkalmazkodó „generalisták”. Az OmniXtreme-nek sikerült áthidalnia a hírhedt „sim-to-real” szakadékot az extrém dinamika területén, ezzel pedig egy olyan keretrendszert tett le az asztalra, amivel robusztusabb és ügyesebb humanoidokat építhetünk. Az open-source hozzáférés pedig valószínűleg turbófokozatba kapcsolja a jövő robot-tornászainak és táncosainak fejlesztését.












