Azt a fajta hírt kaptuk, amitől a robotikai szoftvermérnökök világszerte idegesen kezdik el frissíteni a LinkedIn-profiljukat: az Anthropic lerántotta a leplet legújabb modelljéről, a Claude Opus 4.7-ről, amely közel 38-szor gyorsabban képes beprogramozni egy hús-vér robotot, mint egy profikból álló emberi csapat. A cég „Project Fetch Phase Two” névre keresztelt kutatása szerint az MI mindössze 9 perc 35 másodperc alatt, teljesen autonóm módon végzett el egy sor összetett robotikai feladatot. Ugyanehhez a munkához a segítség nélküli emberi gárdának 361 percre volt szüksége.
Ez nem csupán egy aprócska gyorsulás, hanem egy valóságos kvantumugrás. Alig tíz hónappal ezelőtt, 2025 augusztusában az Anthropic lefuttatta a kísérlet első fázisát. Akkor az akkori zászlóshajó, az Opus 4.1 már az első lépésnél elvérzett: képtelen volt csatlakozni a négylábú „robotkutyához”. Egy Claude-dal segített emberi csapatnak akkor 181 percbe telt a feladatok abszolválása, míg az MI nélküli csapat több mint hat órán át küzdött. Ugorjunk előre a mába: az Opus 4.7 nemcsak pikk-pakk csatlakozott, de a teljes munkafolyamatot 19-szer gyorsabban pörgette le, mint az első teszt MI-vel megtámogatott emberei.

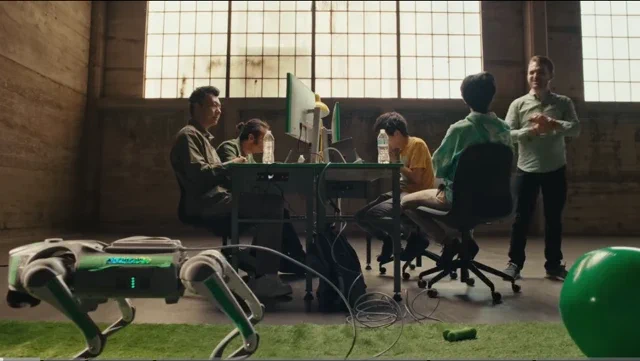
A feladatok egyáltalán nem voltak triviálisak: a robot kamerájához és lidar szenzoraihoz való csatlakozástól kezdve egy útvonalkövető program megírásán át egészen egy strandlabda számítógépes látással (computer vision) történő felismeréséig terjedtek. Az emberi kutató dolga mindössze annyi volt, hogy bedugja a laptopot, megadja az alappromptot, és jóváhagyja az MI lépéseit. A Claude elintézte a többit: megkereste a megfelelő szoftverkönyvtárakat, megírta, majd le is futtatta a kódot.
Miért akkora szám ez?
Az Anthropic legmegdöbbentőbb megállapítása az, hogy ez a brutális teljesítményjavulás nem célzott robotikai tréning eredménye. Ehelyett ez egy úgynevezett „emergens képesség”, ami egyszerűen a generális MI-modellek skálázásából (scaling) „potyogott ki” – ugyanabból az erőből, ami a chatbotok és képgenerátorok fejlődését is hajtja. Ez azt sugallja, hogy ahogy az alapmodellek (foundation models) okosodnak, velük született képességük lesz a fizikai világgal való interakció és annak programozása.
A technikai kulcs az, amit az Anthropic „agentic loop”-nak (ágensi huroknak) nevez: a modell kontextust gyűjt, cselekszik (például kódot ír), ellenőrzi az eredményt, majd kezdi elölről a ciklust. Az Opus 4.7 „adaptive thinking at maximum effort” üzemmódban futott, ami egy olyan érvelési mód, amely lehetővé teszi a modell számára, hogy az egyes lépések között is gondolkodjon. Ez az összefűzött érvelés teszi lehetővé, hogy az MI észrevegye a hibát – például egy sikertelen szenzorcsatlakozást –, és korrigálja a következő parancsát anélkül, hogy emberi segítségre várna a hibakereséshez (debugging). Bár az Anthropic megjegyzi, hogy a modell még küzd a finommotoros precíziós feladatokkal, a robotok üzembe helyezése előtt álló gát éppen most dőlt le. A szűk keresztmetszet már nem a hardver legyártása, hanem az, hogy ki – vagy mi – tudja azt a leggyorsabban felprogramozni. Jelenleg pedig a tuti tipp a szilíciumra érkezik.